主要产品有LED 、整体反射 、电动综合手术台、电动妇科手术台、电动多功能医用病床、 各类型医用病床、医用吊塔、器械车、器械柜、器械台等 300多个品种

山东德曼医疗设备集团有限公司坐落于山东省充州工业园区,占地面积200亩,公司总资产5亿年生产能力20亿元,注册资金壹亿元。主要产品有LED无影灯、各类电动、液压手术台、医用吊元,塔、医用吊桥、医用
等医疗医护设备。
公司拥有先进的喷涂流水线1套、各类数控加工设备多台、日本OTC焊接机器人等先进的机器设备。雄厚的实力、先进的设备、现代化的管理、高素质的员工队伍,铸就了高品质的德曼产品,产品覆盖了国内所有省市、自治区,并销往欧美、中东、非洲、东南亚等多
个国家地区。经过不断的努力和发展,公司现已成为国内较好的医疗设备制造商。
集团年生产能力
占地面积200亩
注册资金壹亿元
26
2023-12
作为手术室中的重要医疗器械,在手术过程中起着至关重要的作用。它是几乎所有手术都不可或缺的设备之一,为手术提供必要的照明,确保手术视野清晰,从而提高手术的准
25
2023-12
溶栓称重床是一款能够显示体重的病床,其配备4个高精度称重传感器,称重精度达到10g,显著提高用药的准确度。那么大家知道溶栓称重床有什么功能吗?溶栓称重床床体结构采用模块
25
2023-12
是医疗行业中不可或缺的重要设备,广泛应用于手术室、医美整形和医院门诊等领域。作为特殊的手术照明设备, 在手术过程中为医生提供清晰、均匀的照明,同时
23
2023-12
医护常用的婴儿车,舒适静音是基本的特点,新品婴儿车的隐藏式升降较是亮点,不推行轻松,而且较别具匠心,婴儿车柔性细节设计,较符合婴儿病房的环境,呈现出较与众不同的温馨感。
23
2023-12
本篇文章为大家介绍电动手术床的结构和功能,电动手术床也是手术床的统称,根据手术床的原理,手术床应该被称为电动手术床和电动液压手术床两种,两种手术床组成不同,原理也不同










主要产品有LED 、整体反射 、电动综合手术台、电动妇科手术台、电动多功能医用病床、 各类型医用病床、医用吊塔、器械车、器械柜、器械台等 300多个品种

集研发、生产、销售为一体的医疗设备生产企业

引进了加工设备,拥有齐全的检测手段,生产技术先进,工艺精良

具有多年生产医疗设备的丰富经验

主要产品有 系列、电动手术床系列、吊塔系列等两百余个品种

我们产品的质量都应以客户满意为标准、让客户信赖为目标

从营销到售后都有专门为客户解疑答惑,提供优质服务
Copyright◎All Rights Reserved 版权所有:山东德曼医疗设备集团有限公司 备案号: 鲁ICP备19062506号-1



 满天星
YDE700-500
满天星
YDE700-500 铝壳
700-500
铝壳
700-500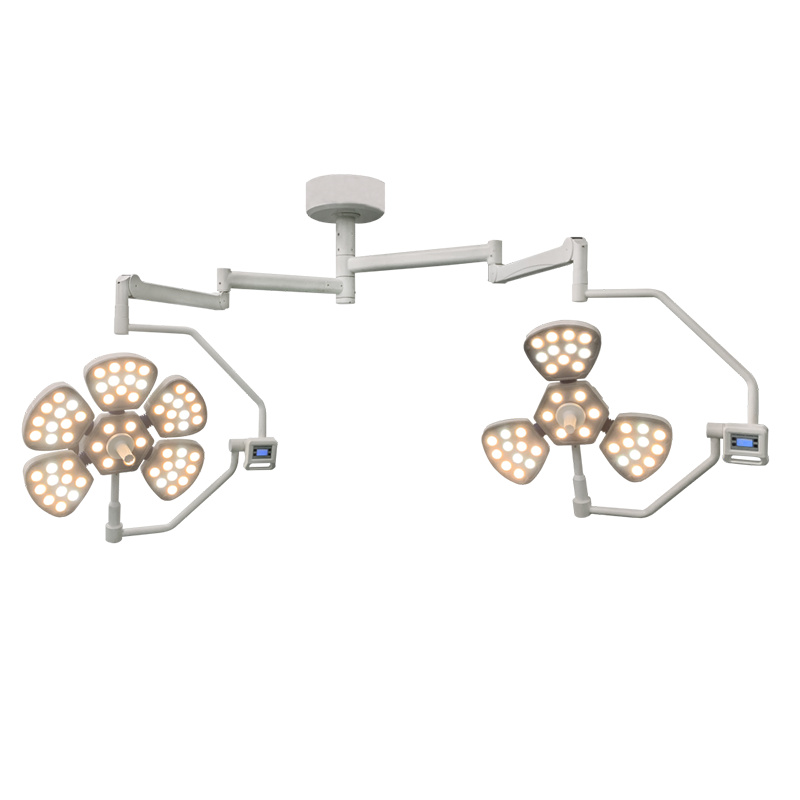 花瓣
YDE 700-500
花瓣
YDE 700-500 整体反射无影灯 YDZ 700-500
整体反射无影灯 YDZ 700-500 DST-3004 抽拉式电动妇科手术台
DST-3004 抽拉式电动妇科手术台 DST-500A 电动手术台
DST-500A 电动手术台 DST-3 电动液压手术台
DST-3 电动液压手术台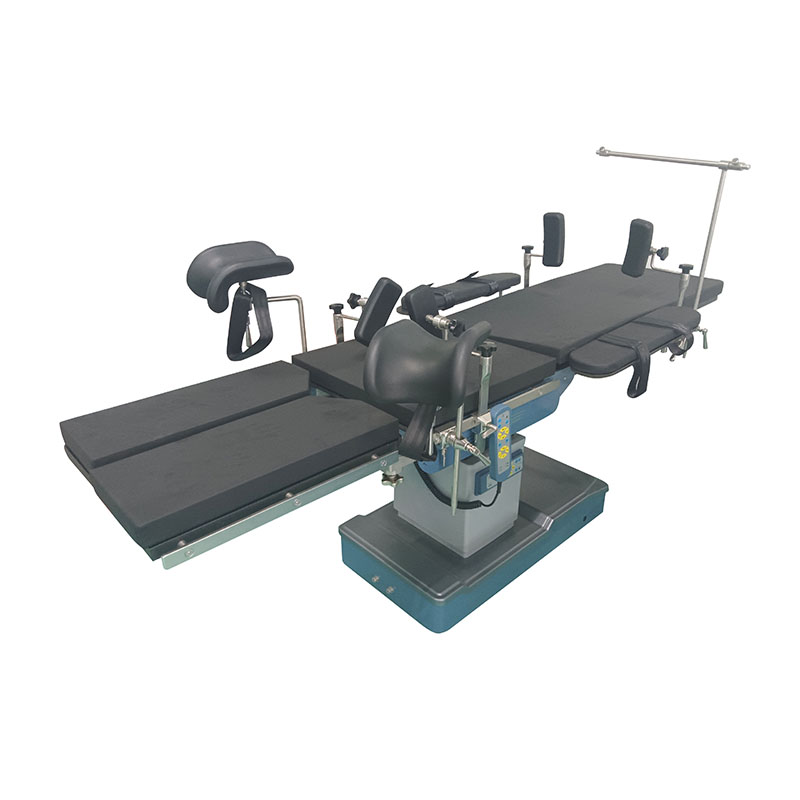 DST-700G 电动骨科导航影像手术台
DST-700G 电动骨科导航影像手术台 DHC-IV(FG07)七功能电动病床
DHC-IV(FG07)七功能电动病床 DHC-IV(DM05)多功能电动病床
DHC-IV(DM05)多功能电动病床 电动病床 DHC-III(FEO1-C)
电动病床 DHC-III(FEO1-C) 电动病床 DHC-II(AO03)
电动病床 DHC-II(AO03) DMYL-3600单臂机械镜塔
DMYL-3600单臂机械镜塔 DMYL-3600-2双臂机械镜塔
DMYL-3600-2双臂机械镜塔 DMYL-580多功能医疗柱
DMYL-580多功能医疗柱 DMYL-180-X吊桥(干湿分离)
DMYL-180-X吊桥(干湿分离)
